
Soft modular robots
This was my main project working as R.A in the robotics lab in the department of mechanical engineering at the University of Chile. It was a continuation of this investigation.
I obtained interesting results, but dropped the project as I moved to another job. The data and findings remain unpublished.
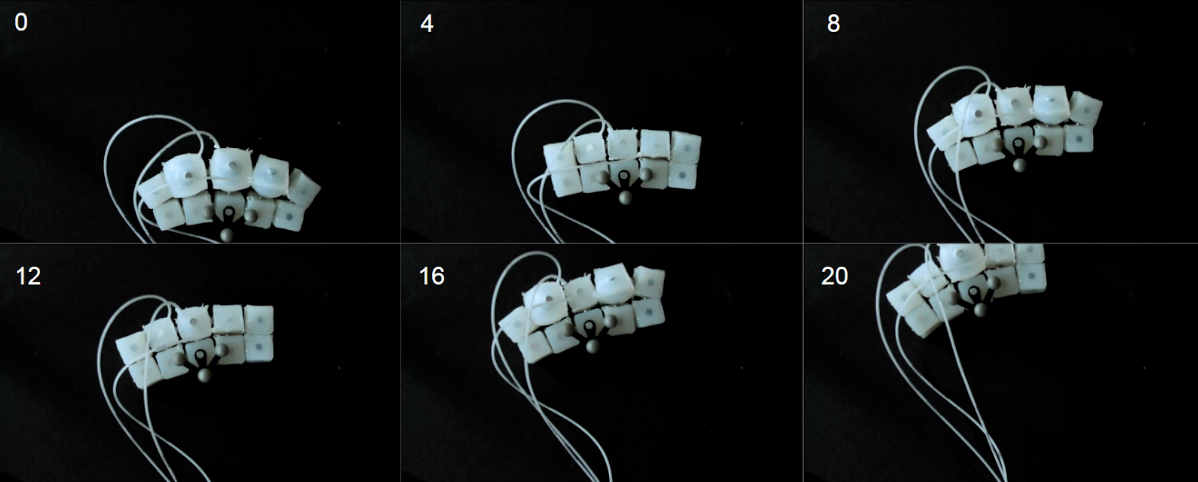
Two of the configurations, developing a crawling gait.
A few years later, I provided an actuation and control system for a similar project, using elastomeric metamaterials for a worm like modular robot. Here it is the publication.
